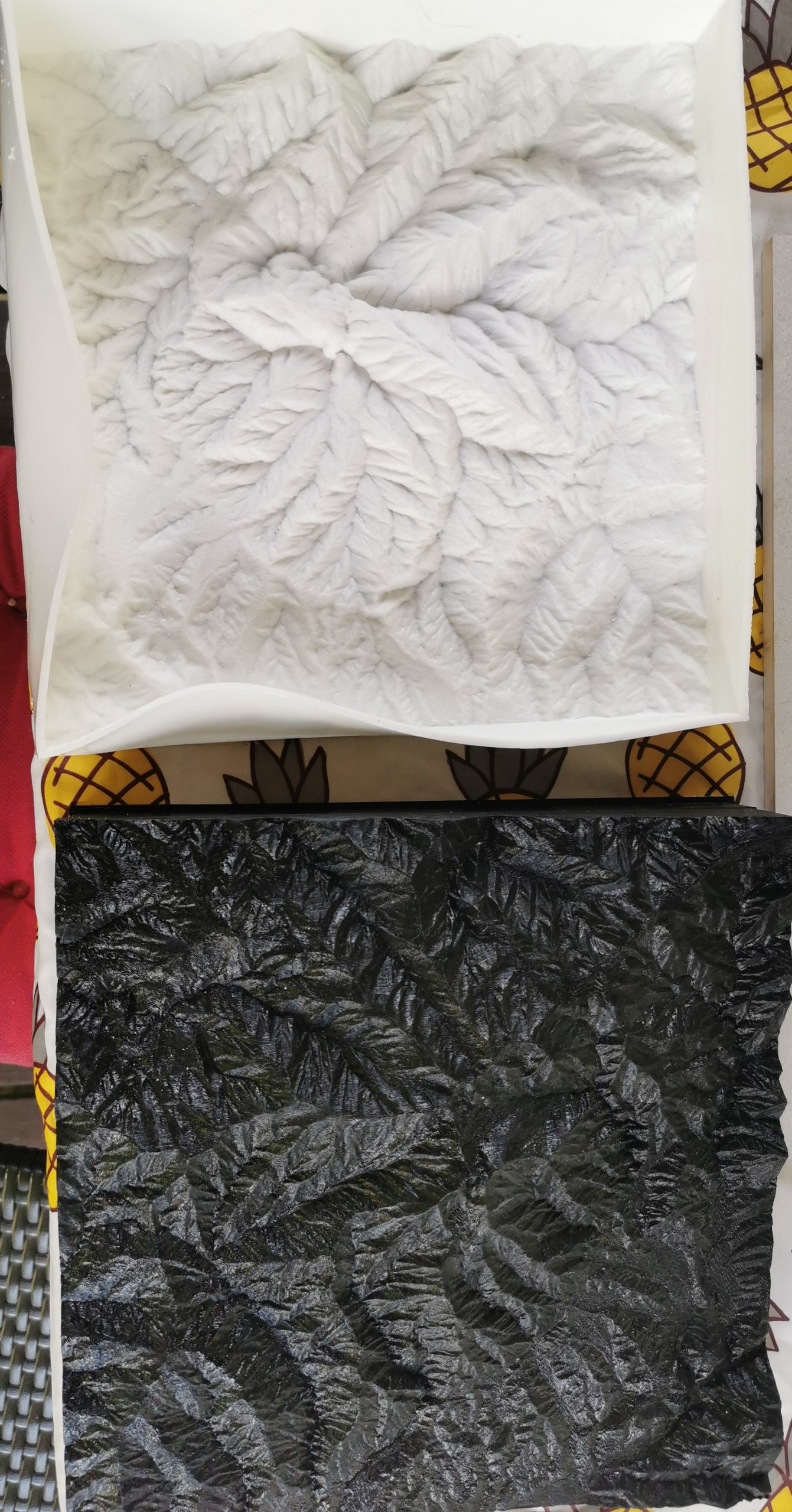
Avant de faire un gâteau représentant fidèlement le relief d’un massif montagneux, il faut fabriquer le moule. L’opération est simple dans son principe même si sa réalisation demande un peu de savoir-faire et beaucoup de patience. On utilise le modèle numérique de terrain de l’IGN qui décrit le relief de l’ensemble du territoire français, Les fichiers et les programmes permettant de les traiter sont mis à disposition gratuitement par l’IGN. On extrait la portion de territoire choisi et on l’imprime à l’aide d’une imprimante 3D. On dispose alors d’un modèle en plastique. A partir de ce modèle on coule du silicone alimentaire pour obtenir un moule « négatif » dans lequel on pourra faire le gâteau.
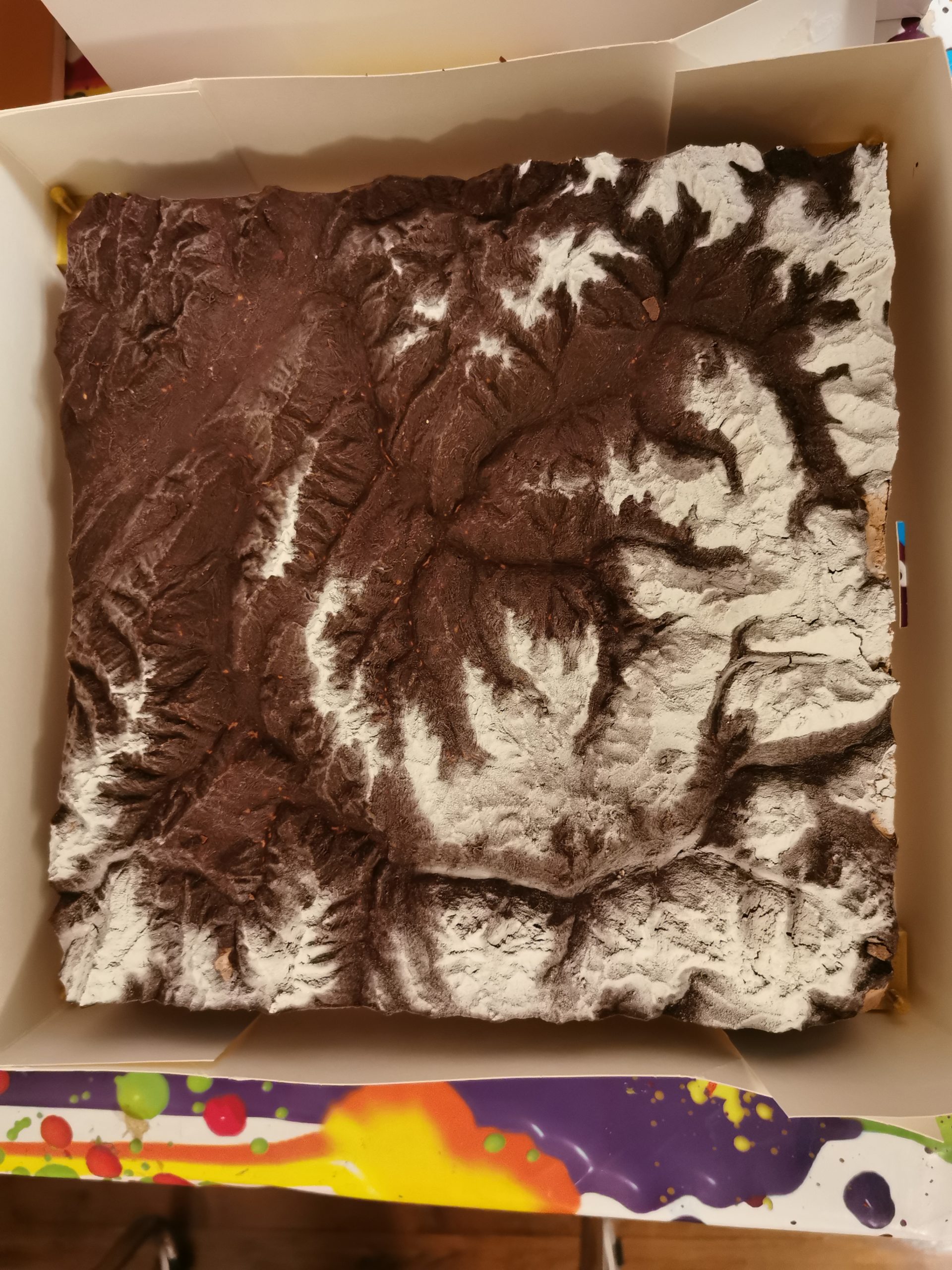
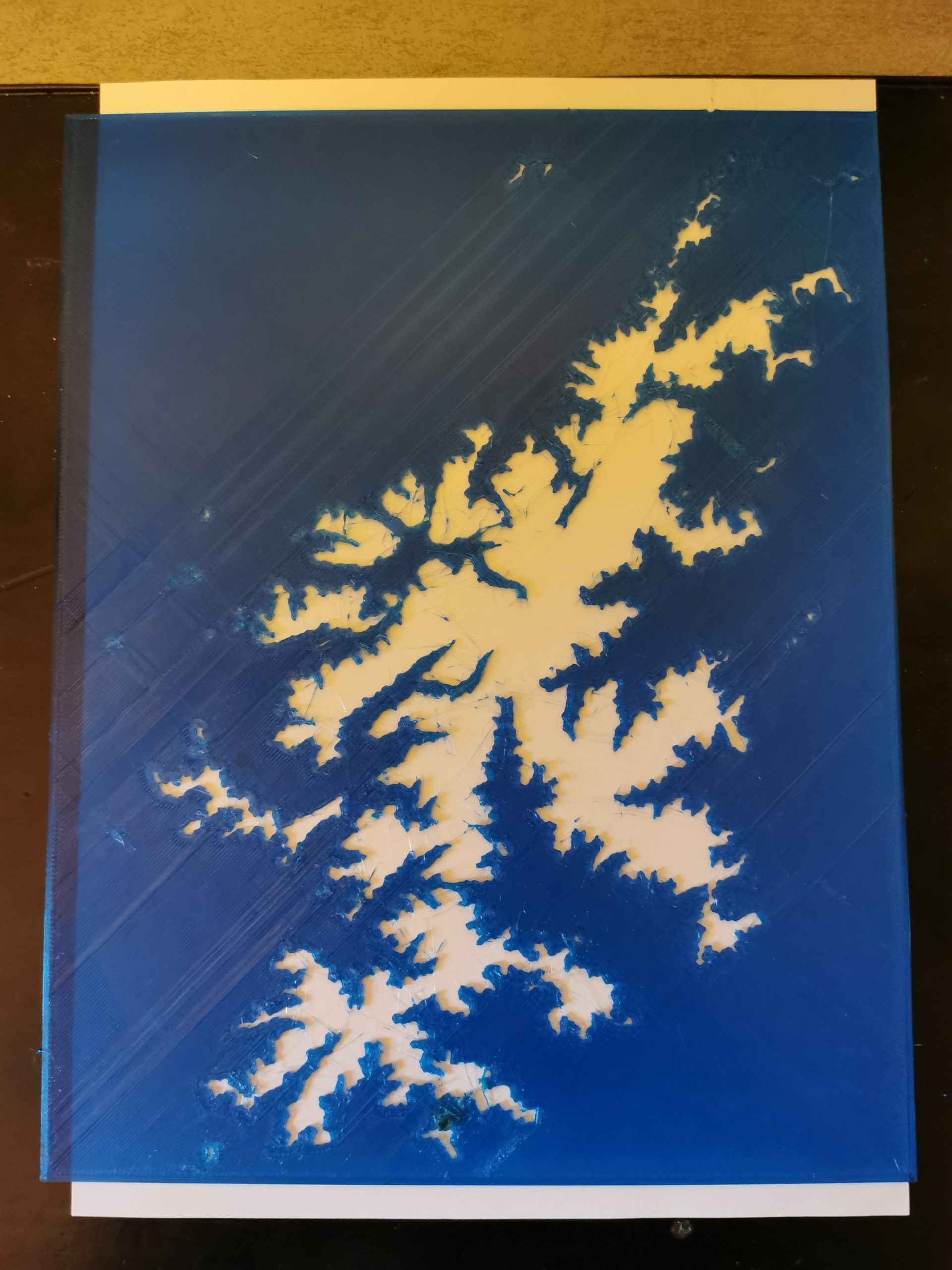
Voici quelques photos de gâteaux :










et le mode d’emploi pour fabriquer les moules, c’est par là :