(copié/volé du message de Technistub le fablab organisateur)
Le grand jour approche. Venez découvrir la robotique et toute une multitude d’ateliers autour du DIY:
Kidslab
initiation à la robotique
initiation à l’électronique
live coding musical
course de drone (pilotage par les visiteurs)
chimie
démo R2D2
imprimantes 3D
machines infernales
etc.
C’est ouvert à tous, il s’agit d’un prétexte autour des combats de robots pour faire découvrir un univers plus large que n’est celui du DIY, du faire soi-même, de l’expérimentation et des technologies.
Nous nous sommes rendus samedi 8 avril en terrain hostile : au Technistub de Mulhouse (le fablab local) pour un combat de robot. Nous avions donc amenés Nybistructor, notre robot de combat, avec quelques modification par rapport à l’année dernière :
Tout se passait au KMØ, ancien lieu de départ du comptage de la distance ferroviaire. De nombreux stands étaient présent, aussi bien pour faire participer les visiteurs au DYI et présenter diverses réalisations :
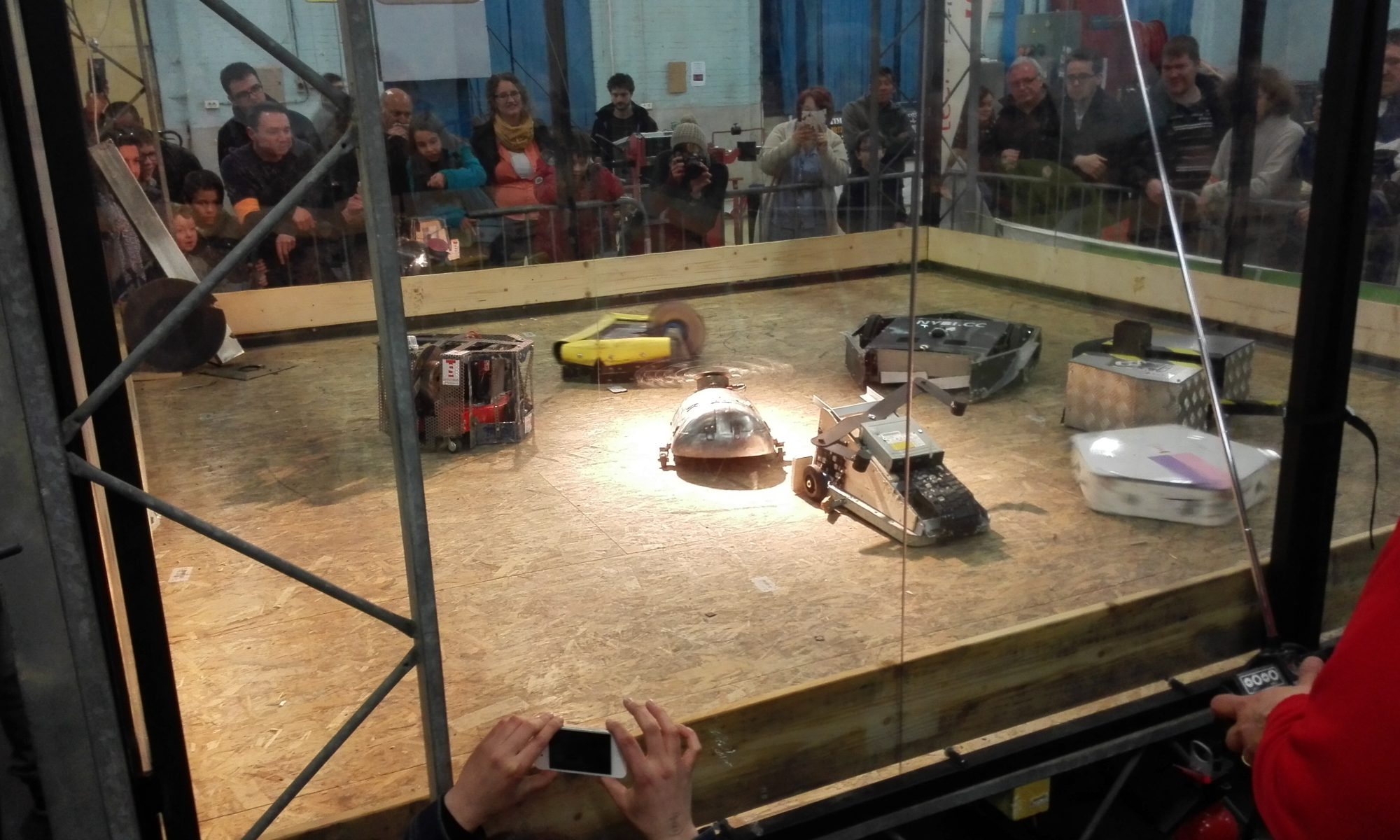
Mais surtout, et c’était le but de notre visite, la baston de robot ! Voici la feuille de match des combats de la journée. Vous pouvez aussi revoir les combats sur la chaîne Youtube du Technistub, qui a diffusé l’événement en live sur youtube.
Nous sommes sortis de poules in-extremis, et avons gagné le quart de finale par forfait du robot adverse, qui subit un court-circuit juste avant le combat, pour perdre en demi-finale, et s’incliner en petite finale dans un beau combat, à bases de pirouettes et saltos.
Nous avons donc obtenus la 4ème place, avec un robot bien amoché.
La mélée après le combat final Nybistructor contre le Marteau. Marteau qui n’en n’était plus un, car son pilote à eu la bonne idée de changer d’arme… (sans quoi il n’aurait pas gagné contre nous) 😉
Ça y est notre robot pour le MakerFight est terminé !!
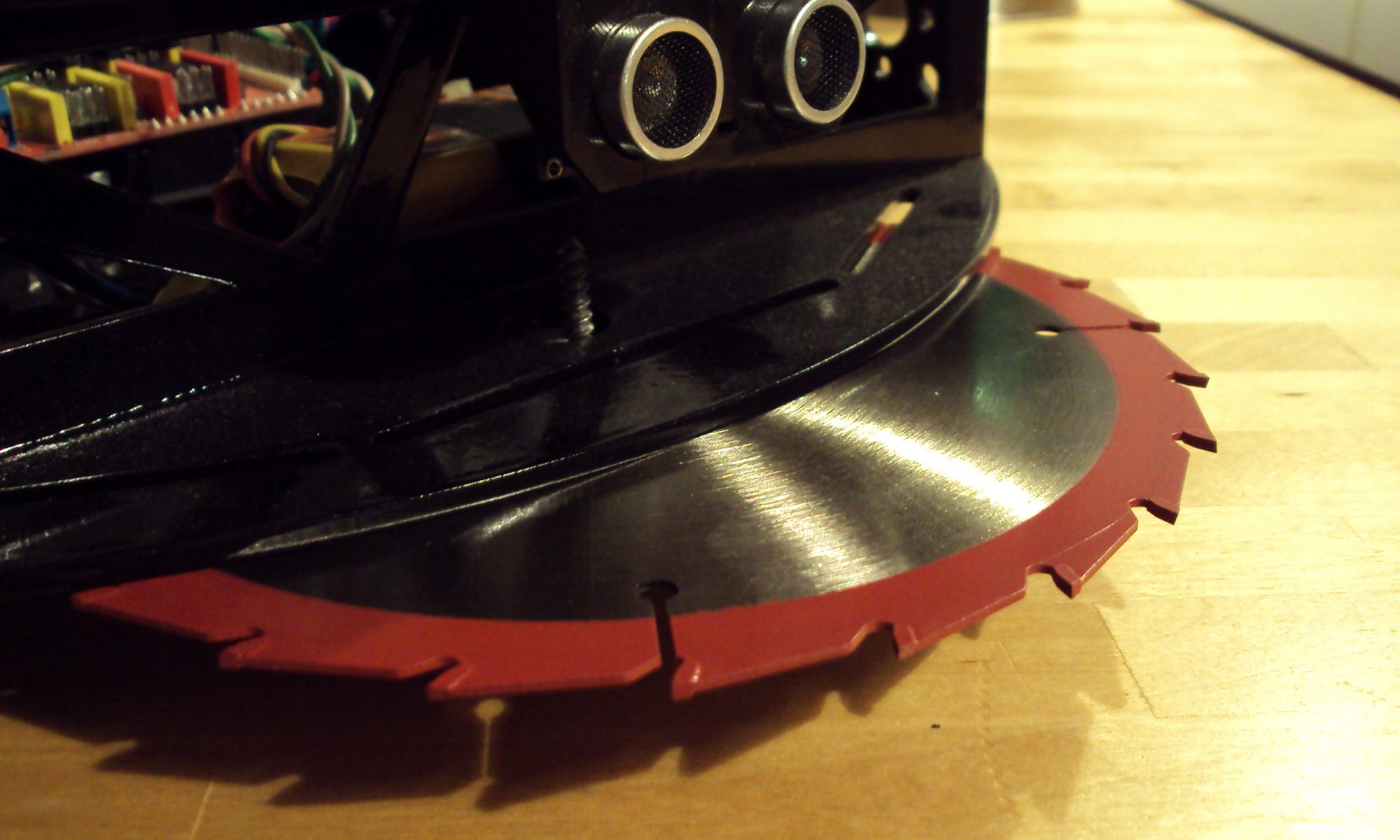
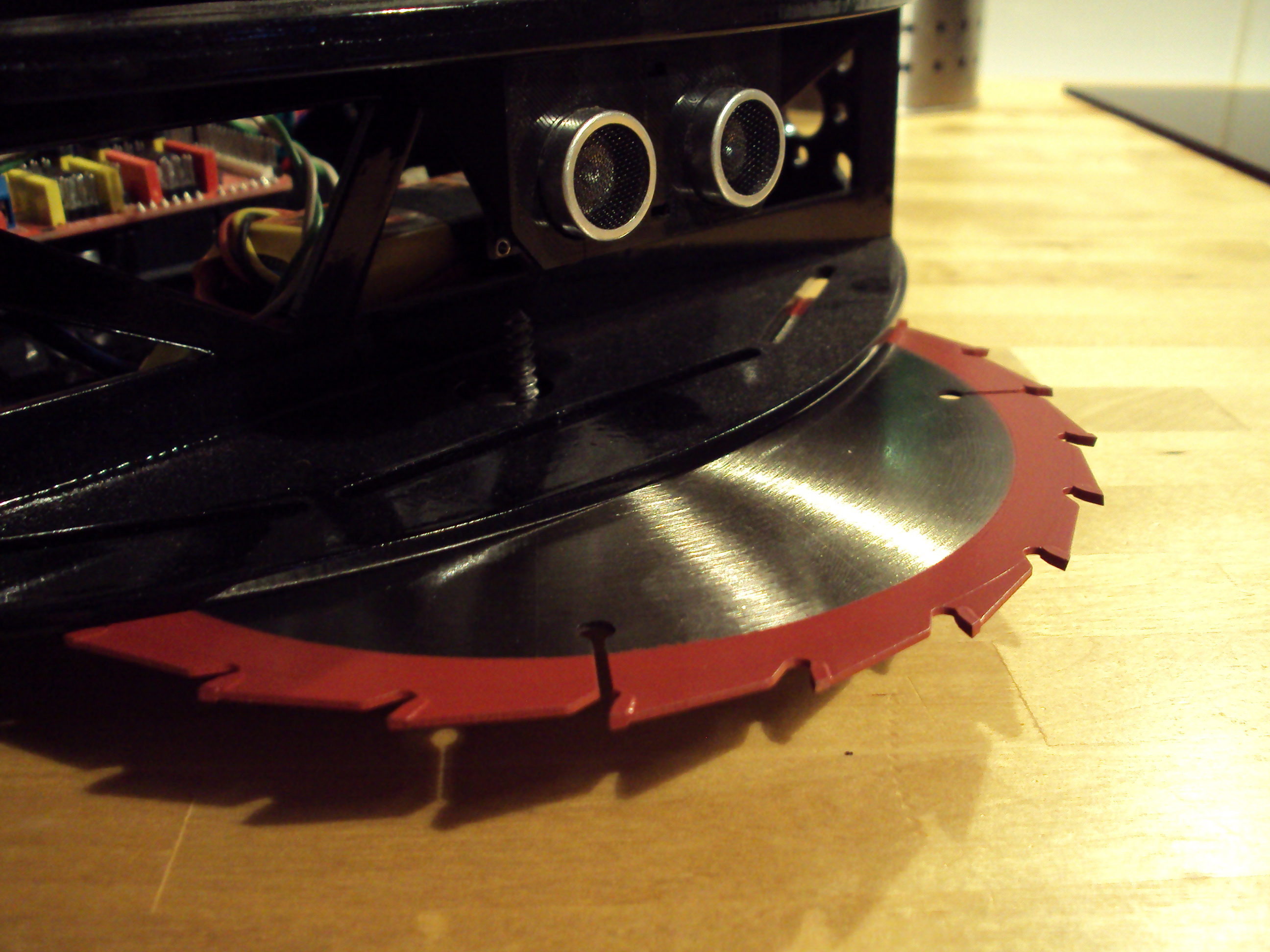
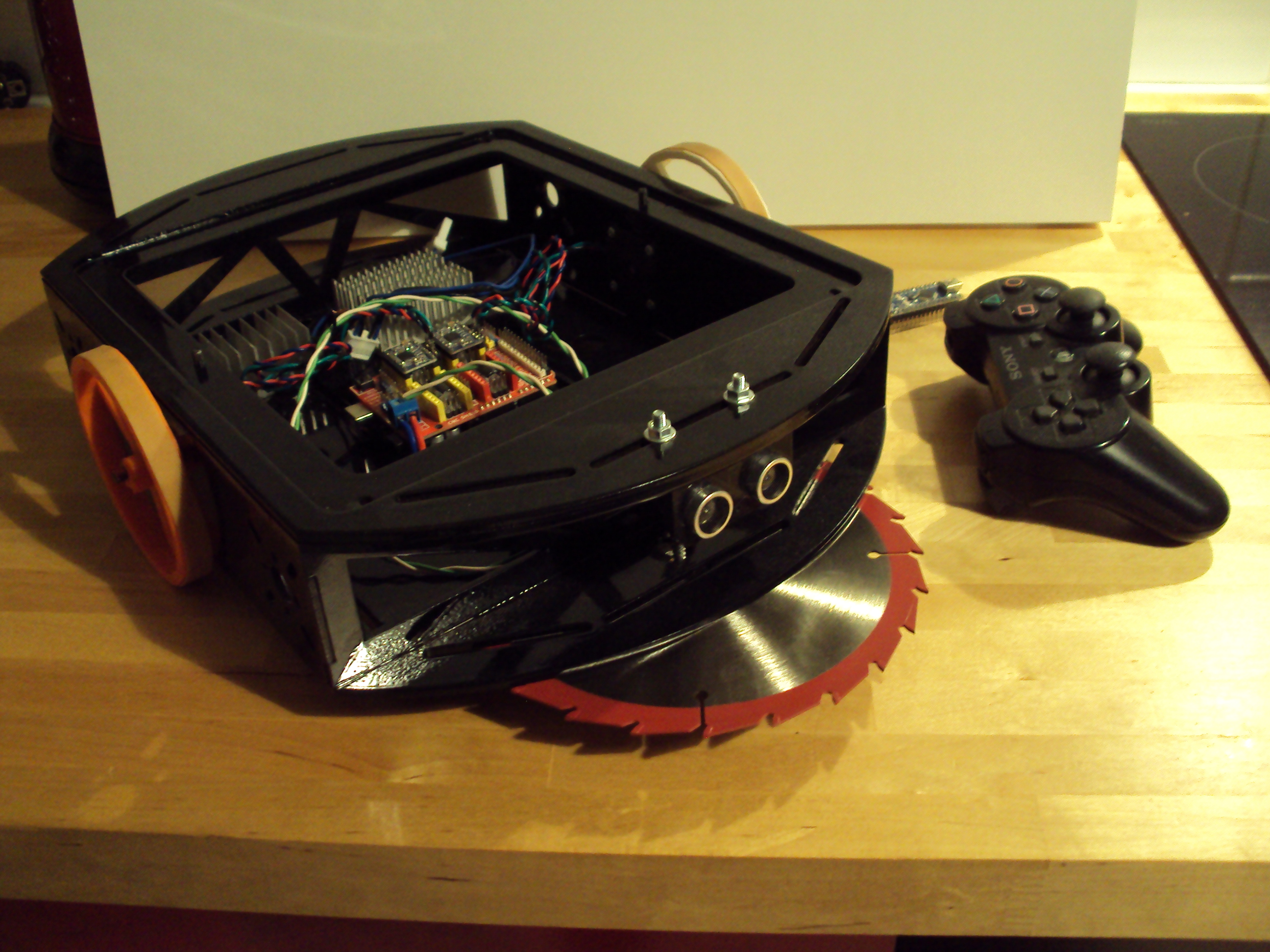
Après 6 mois d’ intense conception , de centaine de lignes de code , de découpe laser d’ une précision micrométrique et 245 heures d’ impression 3D le voila sous sa version définitive entièrement en carbone équipé d’une lame de 28 dents en carbure de tungstène tournant à plus de 25 tours par minute ! De quoi pulvériser n’importe quel adversaire en moins de 1 jours !
Mieux vaut quelques images plutôt qu’un long discours :
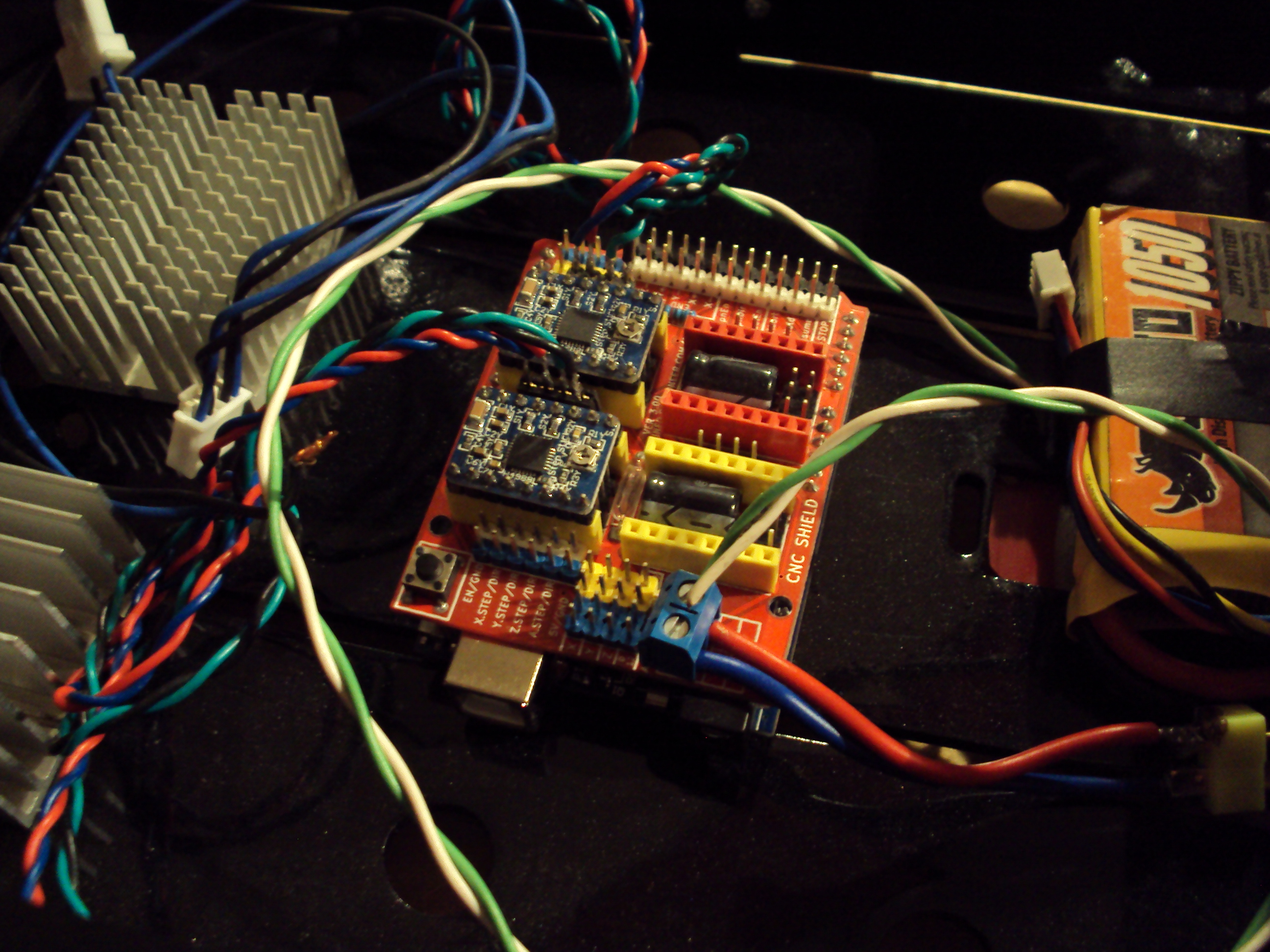
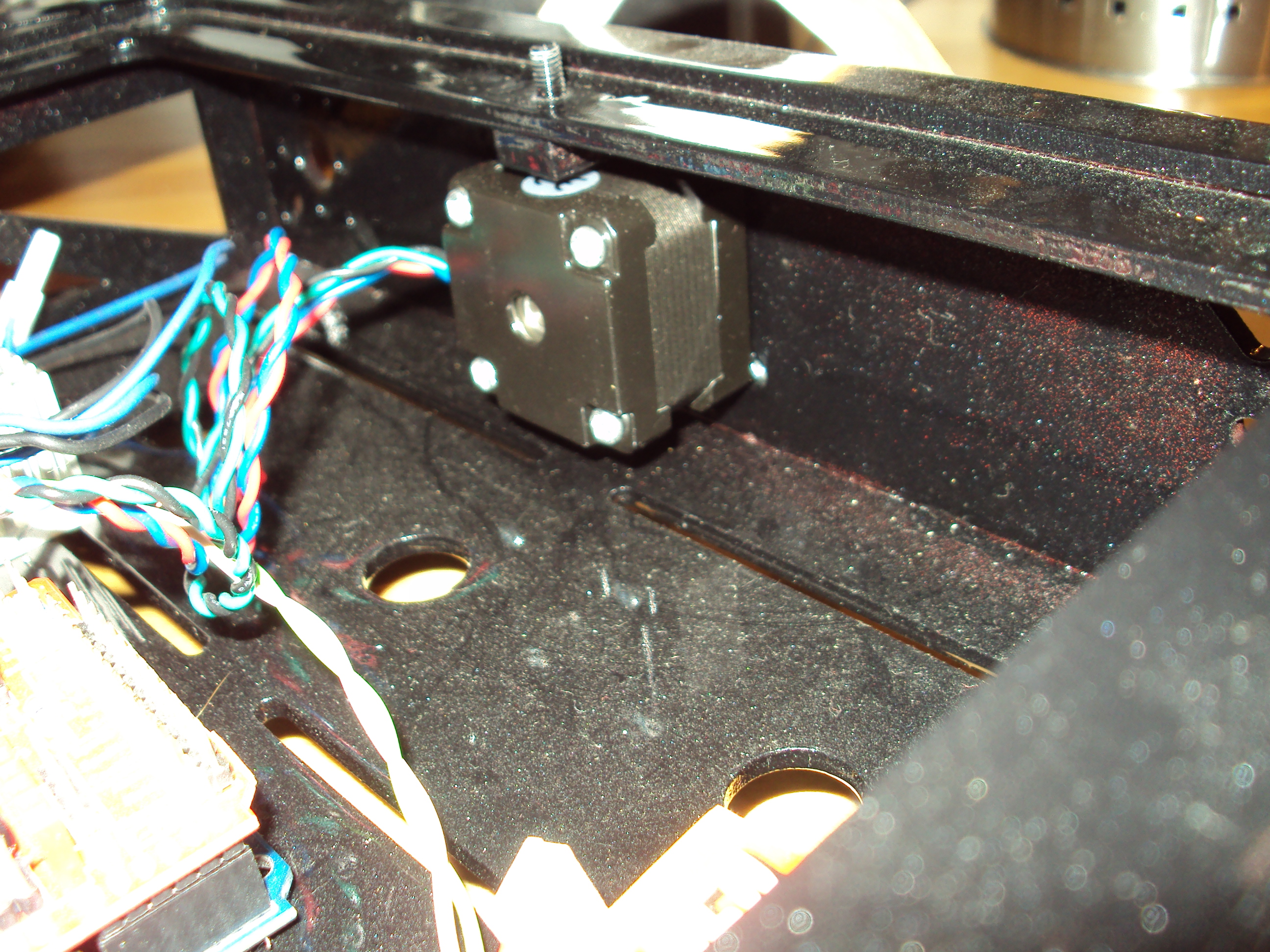
Une électronique de pointeUne motorisation surpuissanteUne visée ultrasonique pour la lame de tungstèneLa bête avec son contrôleur à retour de force
En raison du haut degré d’ innovation créer pour ce projet nous sommes aux regrets de vous annoncer qu’ aucune source, aucun fichier stl ni la moindre ligne de code ne sera partagé en OpenSource .
L’ affiche est superbe , d’autre variante sont sur la page Facebook Technistub .
Je relève le défis de nos amis Alsaciens du Technistub, aidé d’ Amalio la construction tardive (ça serait trop facile sinon 😉 ) d’ un robot de combat est lancée .
Avec ce délais la simplicité est obligatoire .
Représentation 3D du concept
Construit autour d’ un châssis tubulaire il sera motorisé par deux moteurs électriques de récupération qui assureront la propulsion et la direction sur le principe des chars et engin de TP , piloté par un ensemble radio de modélisme. C’ est la radio commande qui permettra le mixage des canaux de pilotage des moteurs .
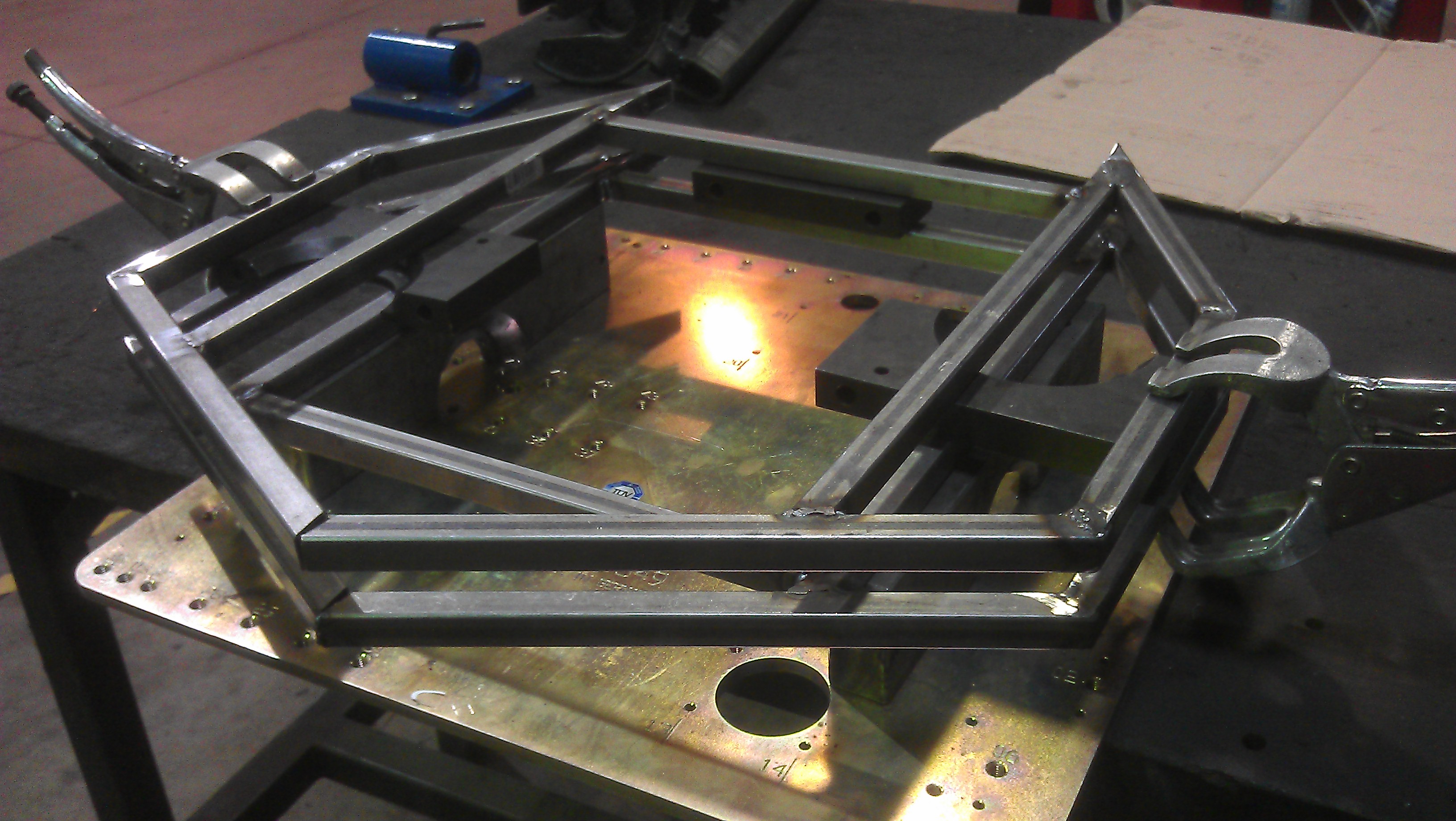
Début d’ assemblage de la structure
Après découpage les segments de tube sont soudés pour former l’ une des deux parties de la structure du châssis, en essayant au maximum de respecter la géométrie (enfin presque…) .
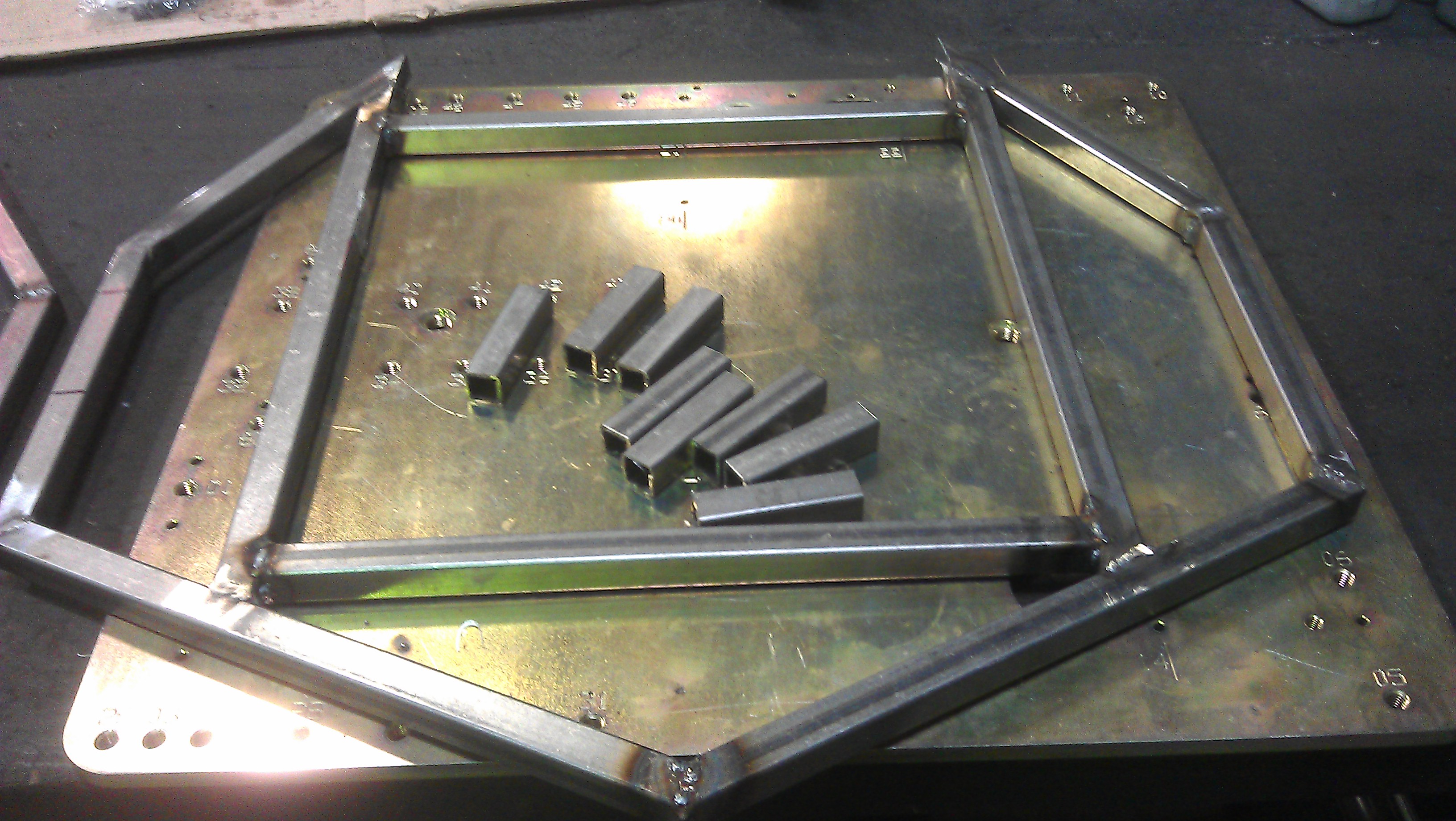
Assemblage de la deuxième partie
Puis la deuxième partie est assemblée en utilisant la première comme gabarit pour avoir deux pièces identiques .
Sur une de ces deux pièces sont soudées des petites barres à 90° pour les assembler .
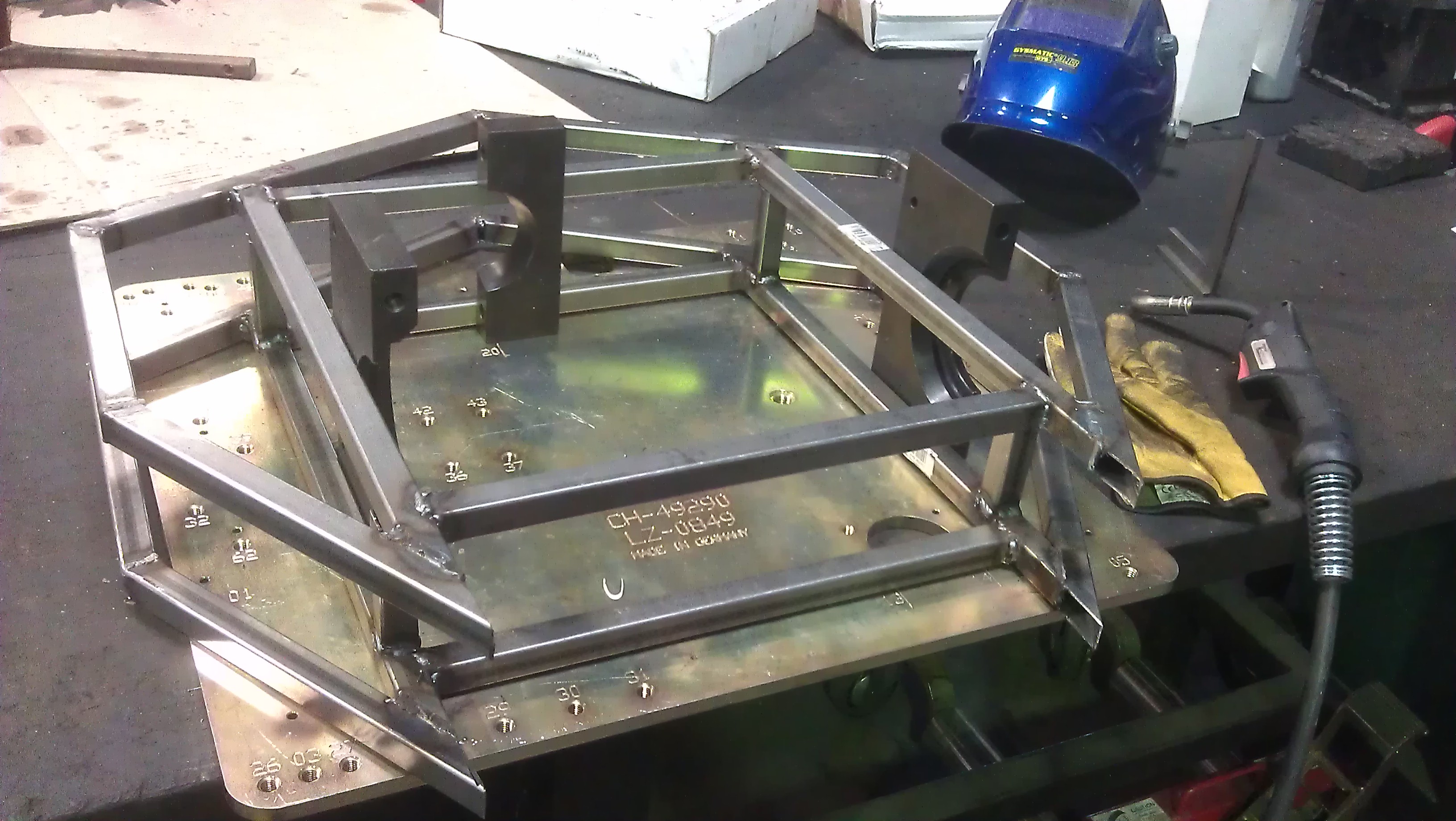
Toujours en essayant de garder une bonne géométrie grâce à 3 pièces de métal qui servent de guide .
Mais même en prenant ces quelques précautions pour respecter la géométrie, après soudure il y a des déformations . J’ aurais dû maintenir plus fortement les barres pendant le soudage .
Il a fallu ruser pour faire passer une petite barre entre les deux pièces principales .
Il a suffi d’ un boulon et d’ une douille à cliquet correspondante pour faire un « écarteur » . En dévissant la vis avec une clé plate, la longueur tète de vis douille augmente et écarte les deux pièces .
Le plus gros du châssis est terminé, 6 kilo ! euh oui… ça va pas être un poids plume .
Prochaine étape les paliers des roues, les supports moteur et les transmissions .















 L’ affiche est superbe , d’autre variante sont sur la page
L’ affiche est superbe , d’autre variante sont sur la page